GFS-UAV N-01A - New improvements Hovering test flights at 5 meters above
the ground created on April 19, 2006 - JLN
Labs - April 19, 2006 Toutes les
informations et schémas sont publiés gratuitement ( opensource
) et sont destinés à un usage personnel et non commercial All informations and
diagrams are published freely (opensource) and are
intended for a private use
and a non commercial use.
On April 18, 2006, I
have conducted a new serie of test flights in a wide open space
with the GFS-UAV N-01A.
The purpose of
these flights test are to :
Check the stability of the
hovering at least at 5 meters above the ground.
Check efficiency of the
yaw control during a high speed vertical take off and
a vertical landing phase.
The gains of the piezo
gyro which are in charge to control the roll and the
pitch axis have been reduced so as to avoid the
oscillations of the craft observed in the previous
tests.
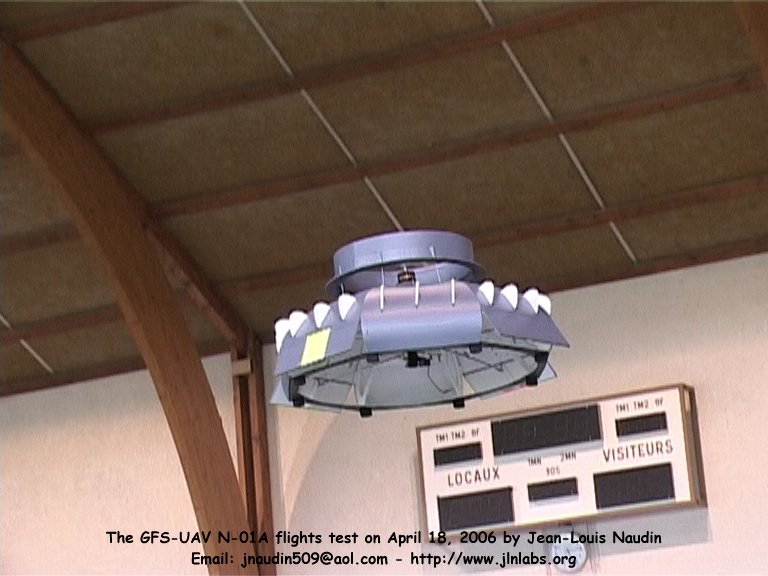
The four curved flaps have
been replaced by flat and rectilinear flaps to
increase the efficiency of the control on the roll
and the pitch axis (see the photo below).
The gap between the blades
and the streamlined body has been greatly reduced to
increase the efficiency of the propeller.
The Center Of Gravity
(COG) has been moved upward, the Lipo battery has
been put on the top and just below the hull.
The gap between the blades and the streamlined body have been
greatly reduced to increase the efficiency of the propeller.
The Center Of Gravity (COG) have been moved upward, the Lipo
battery have been put on the top and just below the hull.
The Lipo battery used is a PowerHouse (selected cells) 3S1P at
11.1V 950mA (rated for 25C)
Lipo pack weight : 96 g
At 5 meters above the ground, the hovering is very stable...
Comments
from Jean-Louis Naudin :
These flights tests are very encouraging, I have been very
surprised by the stability of the hovering at 5 meters above the
ground. The yaw can be very easily controled by the pilot
(myself) and the UAV is able to rotate on demand on its yaw axis
while it do a stable hovering. The latest improvements have
greatly contributed to these results.
This device can be an
excellent VTOL UAV plateform to observe the surrounding...
For more
informations, please contact Jean-Louis Naudin : JNaudin509@aol.com