The GFS-UAV model N-01A Flights tests Logbook created on March 31, 2006 - JLN
Labs - April 7, 2006 Toutes les
informations et schémas sont publiés gratuitement ( opensource
) et sont destinés à un usage personnel et non commercial All informations and
diagrams are published freely (opensource) and are
intended for a private use
and a non commercial use.
March 30, 2006 : 1st preliminary
tests results in laboratory.
Due to windy and stormy weather
conditions, outdoor tests can't be performed. So, I have
conducted some lab tests in the main lab. To avoid that
the craft lift-offs suddenly in the lab and crashes on
the wall, I have used a bigger and heavier Lipo battery
than the normal model.
The purpose of these tests are to :
Check the effect of the
anti-torque system (the 12 moving rudders
controled by the piezo gyro).
Check the efficiency of the
yaw control while the craft hovers above the
ground at very low altitude (in the ground effect
range).
Measure the upward trust on
a balance.
Tests results :
The anti-torque system is
really efficient, the gyro gain is well tuned and
there is no parasitic torque induced by the
rotation of the propeller.
While the N-01A hovers at
low level above the ground, it can be easily
controlled on its yaw axis. I have noticed that
the model has tendency to incline itself forward,
so, I shall need soon to check the CG and the
main motor axis.
To measure the trust, I have
placed the N-O1A on a high precision balance.
At full power the measured trust produced by the
Rex220/1300 and the 9x4.7 propeller was only 295
g...
Conclusion :
These preliminary tests have
demonstrated that the anti-torque system is really
efficient and the control of the model on its yaw axis
works well.
The brushless motor Rex 220/1300 is
not able to provide a sufficient upward trust to provide
a good lift-off. So I have decided to replace this motor
by a higher power engine. I have used an AC 28/7-30 D
brushless motor from MP JET.
Number of cells
6-9 or 2-3x LiPol
RPM per Volt
1100
Maximum recommend speed (min-1)
12000
Maximum speed (min-1)
15000
Maximum efficiency (%)
approx. 79
Current of maximum efficiency
(A)
to 15
Short time currrent (A)
20
Internal resistance Ri
; (mW - miliohm)
81
Dimensions - diameter/length
(mm)
35,5/33
Shaft diameter (mm)
3
Number of turns
30
Weight of drive unit (g)
56
Recommend propeller range
APC 7/3 - 9/6 (10/4,7)
The brushless
motor is connected to a speed controler JETI Advance
30-3P
Different
types of propellers have been tested in the lab : Above a
Graupner CAM Folding prop 9x5
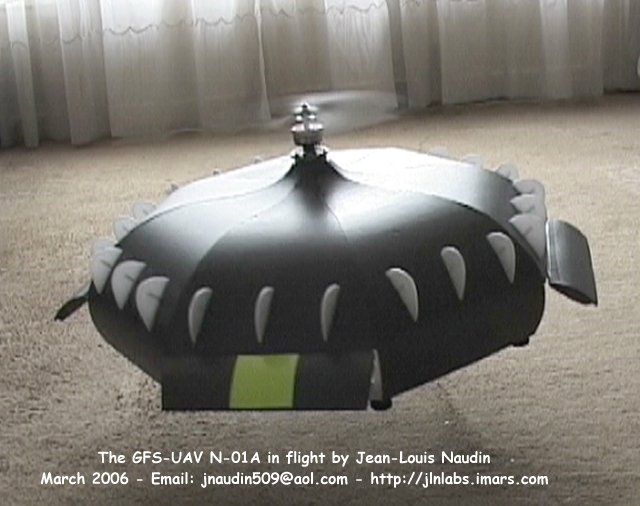
March 31, 2006 : Several lift-off
and hovering have been done successfully with the new
motor in the lab.
Today, the
best propeller tested is an APC Electric 10 x 7 E from
Landing Products.
The
tendency to incline itself forward observed during the previous
test has been corrected by adding 18 g of lead to the
opposite side. With such a setup the GFS-UAV has done
successfully several short lift-off and hovering in the lab, but
I need more space to fly at higher altitude...
Today, I recommend you
to use at
least a 150 Watts brushless motor with your GFS-UAV N-01A
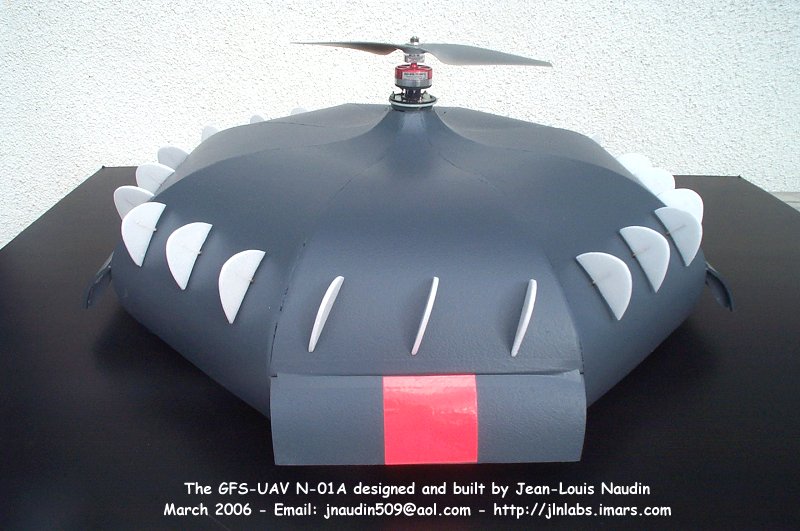
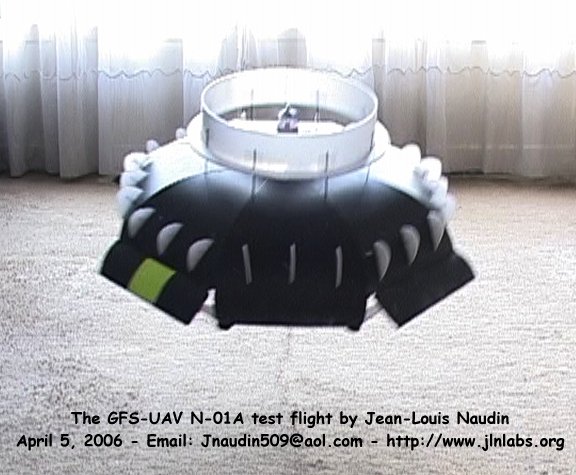
April 5, 2006 : Improved trust and better
stablity with the streamlined body around the propeller
Today,
I have added a streamlined body 280 mm diameter and 60 mm height
and placed at 45 mm above the hull. Wooww, the efficiency is
greatly improved and I have been surprised by the sudden lift-off
of the N-01A and its remarquable stability. The strealined body
is made with a 3 mm thick depron foam and fixed with 8 carbon
rods (2 mm diam) on the hull.
I
recommend strongly to add this body on the GFS-UAV.
April
7, 2006 : Successful
OUTDOOR tests flights !!!
Click on the
picture to see the photos and a video of the outdoor flights.
More
tests results are coming soon, stay tuned...
For more
informations, please contact Jean-Louis Naudin : JNaudin509@aol.com